S2 can output left and right grayscale images, parallax images, 3D point cloud data, lane line recognition results (output cubic equations converted into world coordinate systems), obstacle extraction results and other multi-dimensional information through the SDK. It can also independently complete FCW, LDW, HMW and other auxiliary driving functions and provide auditory and visual alarms. If the driver does not decelerate, the system can automatically brake to slow down the vehicle, effectively reducing the probability of traffic accidents.
 Functions
Functions
1) Forward Collision Warning (FCW): When the vehicle is driving, the system monitors all objects in front of the vehicle (such as cars, pedestrians, bicycles, flower beds, etc.) in real time. When the possible collision time between the vehicle and the obstacle in front reaches a critical value and the system determines that there is a risk of collision between the vehicle and the forward obstacle, the system will issue a forward collision warning reminder to the driver.
2) Lane Departure Warning (LDW): When the vehicle is driving, the system monitors the road markings in front of the vehicle in real time. When the vehicle is driving along the line without turning on the turn signal, the system will issue an early warning to the driver.
3) Workshop time monitoring (HMW): When the vehicle is driving, the system combines the vehicle's speed information and the distance between the vehicle and obstacles ahead to perform real-time calculations. When the distance between the vehicle and the forward obstacle is less than the system's preset parameters, the system will issue an early warning to the driver to remind the driver to maintain a safe distance from the forward obstacle.

Revolutionizing Safety for Commercial Fleets
The Smarter Eye ADAS-S2 is designed to empower truck fleet management solutions, forklift fleet management solutions, and autonomous driving companies. By leveraging a powerful stereo vision processor, it detects road environments in 3D, enabling fleet management software solutions to make faster, smarter decisions.
Seamless Integration with Fleet Telematics
S2 easily connects with existing fleet management telematics solutions, supporting oem telematics providers looking for reliable embedded vision modules. It transmits detailed environmental data—such as disparity maps and lane info—for real-time analytics and safety compliance.
Enhance Operational Intelligence
With its stereo imaging and analytics capabilities, the ADAS-S2 system supports iot solutions for fleet management, helping fleet management solutions inc identify risky driver behaviors, reduce downtime, and streamline route planning. It's also ideal for use by autonomous driving companies looking to scale their fleets.
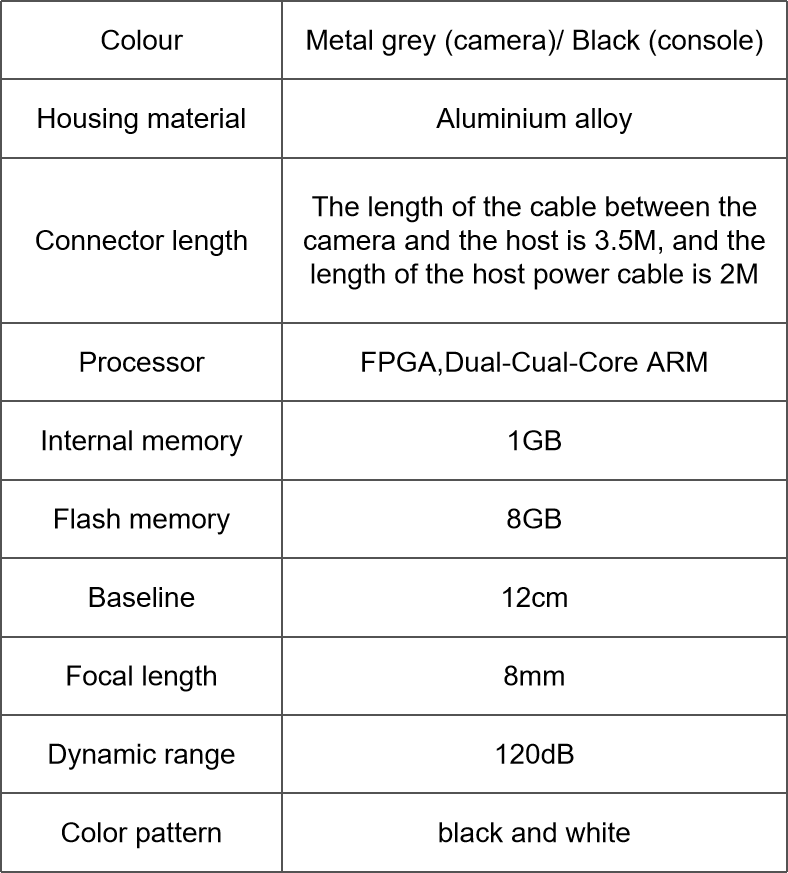
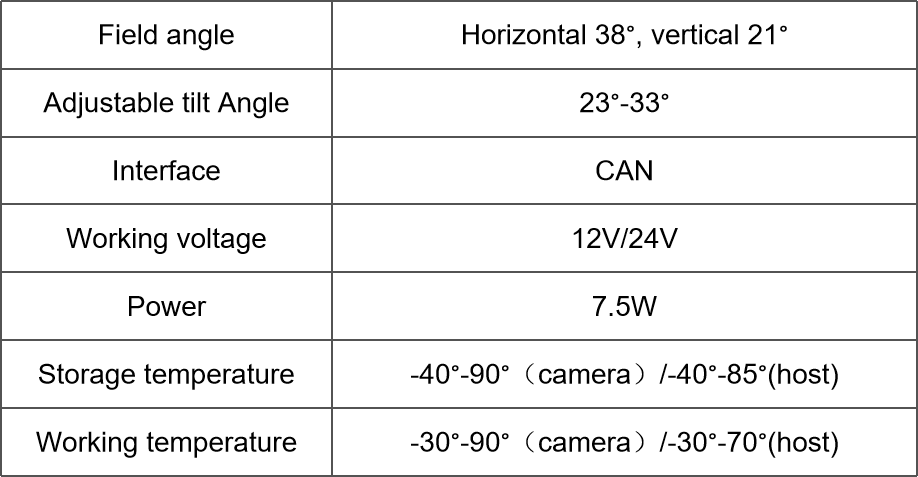
Specifications
Product Advantages
- Comprehensive Safety System: Offers FCW, LDW, and HMW to reduce accident risks and support adas service requirements.
- Precision Stereo Vision: Provides 3D environmental detection, enabling better decisions for fleet management tracking solutions.
- Plug & Play Integration: Fully compatible with fleet management software solutions, GPS trackers, and telematics dashboards.
- Trusted by Industry Leaders: Used by best autonomous driving companies, autonomous driving company fleets, and OEMs.
- Optimized for Commercial Use: Whether it's truck fleet management solutions or forklift fleet management solutions, the S2 adapts to diverse operational demands.
About Us - Smarter Eye Technology
Smarter Eye is a leading Chinese high-tech company specializing in stereo vision-based ADAS and 3D perception systems for commercial vehicles and autonomous driving companies.
Core Manufacturing Capabilities and Quality Assurance
- China’s first enterprise to achieve mass production of rear, quasi-front, and front-mounted stereo vision sensors.
- Full-stack in-house development covering stereo camera hardware, embedded software algorithms, and complete vehicle integration.
- Independent R&D strength with over 300 patents, of which 80% are invention patents.
- All manufacturing adheres to ISO standards and includes rigorous product validation in partnership with OEM customers.
Manufacturing Strength in Numbers
- Over 100,000 ADAS units deployed in commercial fleets including buses, trucks, RVs, and special vehicles.
- A workforce of more than 200, with 70% dedicated to research and development.
- The core team includes experts from the Chinese Academy of Sciences, Microsoft, Toyota, and Delphi.
- Holds 300+ intellectual property rights, including over 240 invention-level patents.
Sustainability Measures
Smarter Eye contributes to environmental goals through intelligent driving solutions that reduce vehicle collisions and optimize driving behavior. By supporting eco-driving and route efficiency, we align with long-term smart mobility and sustainability objectives.
Client Collaboration Process
- Requirements Collection – Understanding specific fleet or OEM needs.
- Solution Customization – Designing appropriate stereo vision and ADAS configurations.
- Vehicle Integration & Validation – Assisting with on-vehicle installation and pilot evaluation.
- Mass Production & Delivery – High-volume production with consistent supply.
- After-Sales Support – Providing global technical and service assistance post-delivery.
Global Service Capability
Smarter Eye serves clients in East Africa, Russia, the Middle East, and other international regions. With multilingual support, experienced logistics, and a strong financing foundation ($35+ million in funding), we offer professional service to partners worldwide.
Partner with Smarter Eye today to upgrade your fleet or OEM products with scalable, high-performance stereo vision solutions — trusted by global leaders and implemented in over 100,000 commercial vehicles.
FAQ
Who are we?
We are Beijing Smarter Eye Technology Co., Ltd., a pioneer in stereo vision and ADAS solutions for commercial vehicles and autonomous driving applications.
How can we guarantee quality?
Our production is ISO-certified and fully integrated with internal R&D. Products undergo strict quality control and safety validation in partnership with vehicle OEMs.
What can you buy from us?
We provide stereo vision cameras, ADAS systems (including FCW, LDW, HMW), 360 panoramic safety solutions, intelligent cockpit hardware, and custom vehicle safety modules.
Why should you buy from us instead of other suppliers?
Smarter Eye is the first to mass-produce stereo vision ADAS in China. We offer superior technology, extensive patent coverage, and successful real-world deployment in more than 100,000 vehicles.
What services can we provide?
We offer custom hardware and software development, integration support, global logistics, technical documentation, and after-sales service for OEMs and fleet customers.
Enhance your fleet’s safety and intelligence with Smarter Eye ADAS-S2. Contact us now for wholesale pricing and OEM integration support!



